
Арт. RFLSI-ZW
Микро/нанороботы собирают энергию из внутренней или внешней среды для достижения активного движения. Благодаря своим крошечным размерам и контролируемому движению они находят широкое применение в биомедицине, особенно в эндоваскулярных системах, таких как удаление тромбов, заживление ран и доставка лекарств. Однако отслеживание этих роботизированных «роев» микророботов в режиме реального времени представляет собой сложную задачу, особенно для методов визуализации, которые предполагают длительное воздействие ионизирующего излучения.

В статье «Отслеживание и навигация микророботов с помощью лазерной спекл-контрастной визуализации для адресной доставки» в журнале Science Robotics [Qinglong Wang et al., Sci Robot. 2024] сообщается об использовании лазерной спекл-контрастной визуализации (LSCI) (RFLSI III, RWD Life Sciences) для отслеживания и навигации магнитных микророботов в кровеносных сосудах в реальном времени, демонстрируя потенциал визуализации и навигации микро/нанороботов с высоким разрешением с помощью LSCI в сложных средах крови как in vivo, так и in vitro. Эти результаты открывают возможности для улучшения таргетных внутрисосудистых препаратов.
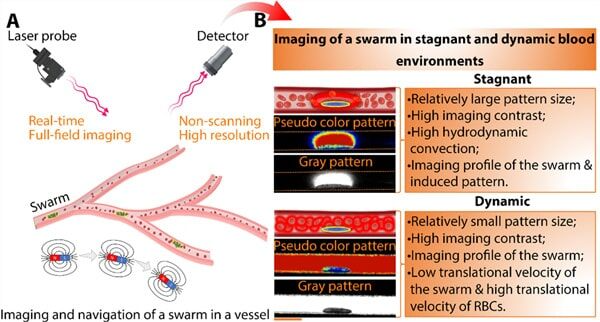
Рисунок 1. Схематическая иллюстрация отслеживания микророботов в реальном времени на основе LSCI
Во-первых, в этом исследовании представлена новая стратегия управления и отслеживания с использованием лазерной спекл-контрастной визуализации (LSCI) для отслеживания и навигации микророботов в реальном времени в различных средах крови. Она предлагает неинвазивный подход к визуализации всего поля с высоким временным и пространственным разрешением. В исследовании анализируется взаимодействие между микророботами и кровяной средой путем количественного изучения распределения перфузионных единиц. Метод LSCI позволяет в режиме реального времени отслеживать и визуализировать микроророботов и их окружение, обеспечивая одновременное отслеживание и навигацию в сложных сосудистых системах.
Исследователи использовали наночастицы Fe3O4@SiO2 в качестве строительных блоков для создания магнитных микроророботов. Микророботами манипулировали с помощью вращающегося магнитного поля, чтобы продемонстрировать поведение «роя». В среде застойной крови вращательное движение микророя эффективно перемешивало окружающие эритроциты (эритроциты), что можно было обнаружить и визуализировать с помощью LSCI. Это позволило провести детальный анализ взаимодействия роя с окружающей его кровяной средой, а также оценить гидродинамическую конвекцию, вызываемую роем. В динамичной среде крови микророи располагались по контрасту с окружающим кровотоком, что позволяло точно отслеживать и ориентироваться в системе кровообращения.
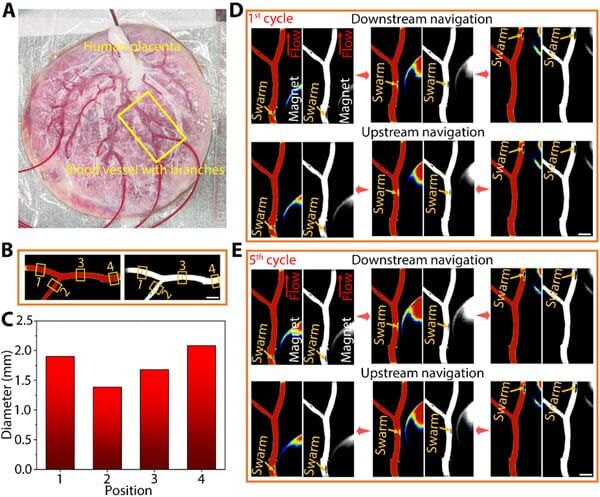
Рисунок 2. Отслеживание и навигация микророя в плаценте человека
Чтобы исследовать визуализацию и отслеживание микророя в реальных тканях, исследователи использовали модели человеческой плаценты. Применяя технологию LSCI, можно получить полноэкранные изображения реальных кровеносных сосудов с разветвлениями, что позволяет эффективно отслеживать положения микророев.
Исследователи использовали медицинский катетер для введения наночастиц в кровеносные сосуды плаценты, затем сформировали микророй с вращающимся магнитным полем, а затем проверили возможности отслеживания и навигации роя в этих сосудах при нисходящих и восходящих потоках. Результаты доказали, что благодаря обратной связи с визуализацией в реальном времени и эффективным стратегиям контроля микророй оставался стабильным как при антеградном, так и при ретроградном потоках и отображал четкие сигналы визуализации. Исследователи успешно отслеживали и управляли роями микро/нанороботов в плацентарных сосудах в течение пяти последовательных циклов с общим расстоянием навигации около 400 миллиметров.
Эти результаты продемонстрировали, что под руководством LSCI стратегия контроля и отслеживания, предложенная авторами, может обеспечить относительно дальнюю и непрерывную навигацию роев микро/нанороботов в плацентарных кровеносных сосудах человека.
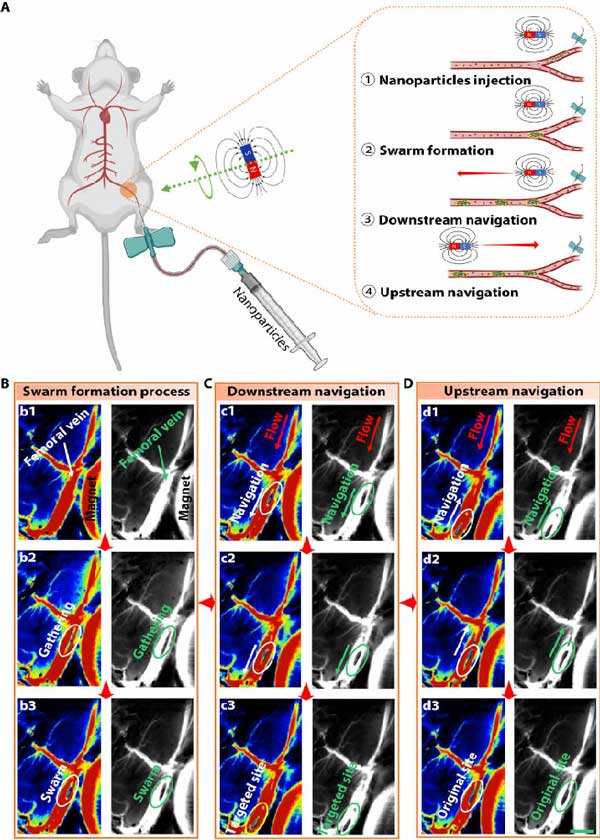
Рисунок 3. Отслеживание и навигация внутрисосудистых микророев в реальном времени in vivo.
Для дальнейшей проверки эффекта визуализации и навигационной способности микророев в естественных условиях исследователи выбрали модель бедренной вены крысы и использовали LSCI для мониторинга внутрисосудистого формирования роев в режиме реального времени. Результаты показали, что до введения наночастиц в целевой вене не было явного сигнала визуализации. Однако после инъекции частицы постепенно агрегировались под воздействием магнитного поля и проявляли контуры микророев в кровеносных сосудах. Полностью сформированные рои демонстрировали более высокую контрастность по сравнению с наночастицами в процессе агрегации.
Таким образом, LSCI-направленное отслеживание в реальном времени и высокоточная навигация магнитных микророев достижимы в сосудистой среде как in vitro, так и in vivo. В то же время этот метод может быть применен для количественной оценки взаимодействия микророя с кровяной средой и эффективной доставки микро/нанороботов в условиях высокоскоростного кровотока (средний поток 55 мм/с). Данное исследование предлагает эффективную стратегию управления микро/нанороботами для осуществления активной внутрисосудистой адресной доставки и вносит вклад в разработку и клиническое применение терапевтических платформ на основе микророев.
Методология исследования: основные моменты
Данная работа демонстрирует процесс формирования магнитных микророев в сосудистой системе и возможность отслеживания и навигации этих роев с высокой точностью в сложных средах крови в режиме реального времени под руководством LSCI. Это обеспечивает неинвазивный подход к визуализации всего поля с высоким временным и пространственным разрешением. Исследователи анализируют взаимодействие между микророем и кровяной средой, количественно исследуя распределение перфузионных единиц. Данное исследование позволило разработать эффективный метод отслеживания и навигации микророя в режиме реального времени, продемонстрировав большой потенциал применения микророя с LSCI-наведением для активной внутрисосудистой целевой доставки.





